


近日,吉林大学任露泉院士团队与英国曼彻斯特大学任雷教授团队的研究人员在《Adv. Funct. Mater.》杂志上联合报道了一种兼具大形变和快响应的电压驱动Nafion离子聚合物-金属复合材料(IPMC)。该文章的通讯作者为英国曼彻斯特大学的任雷教授和吉林大学的梁云虹教授,第一作者为吉林大学的马愫倩博士。
近年来,具有高弹性的人工肌肉被广泛应用于生物医疗和仿生机器人等先进领域。IPMC具有质量轻、制备简单、驱动电压低、弯曲特性好等优点,被广泛应用于人工肌肉。但在实际应用中,往往需要由大变形和快速响应的配合来产生高效制动,而IPMC人工肌肉很难同时实现大形变和快响应,这极大低限制了它们的实际应用。
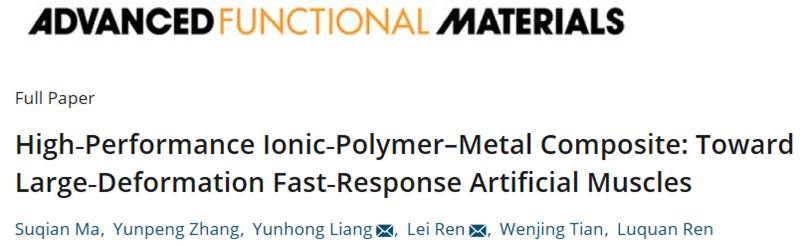
在这项工作中,研究人员报道了一种异丙醇辅助化学镀的方法来制备具有较高质量金属电极的Nafion IPMC。该Nafion IPMC在较低的直流电压和交流电压的驱动下,均能无延迟地做出响应,并产生较大的形变。值得一提的是,当交流电压的频率为19 Hz时,该Nafion IPMC在4 V电压的驱动下,其产生形变的响应时间小于1ms,末端位移的平均速度可达224mm/s,比传统的IPMC运动速率提高了25倍。
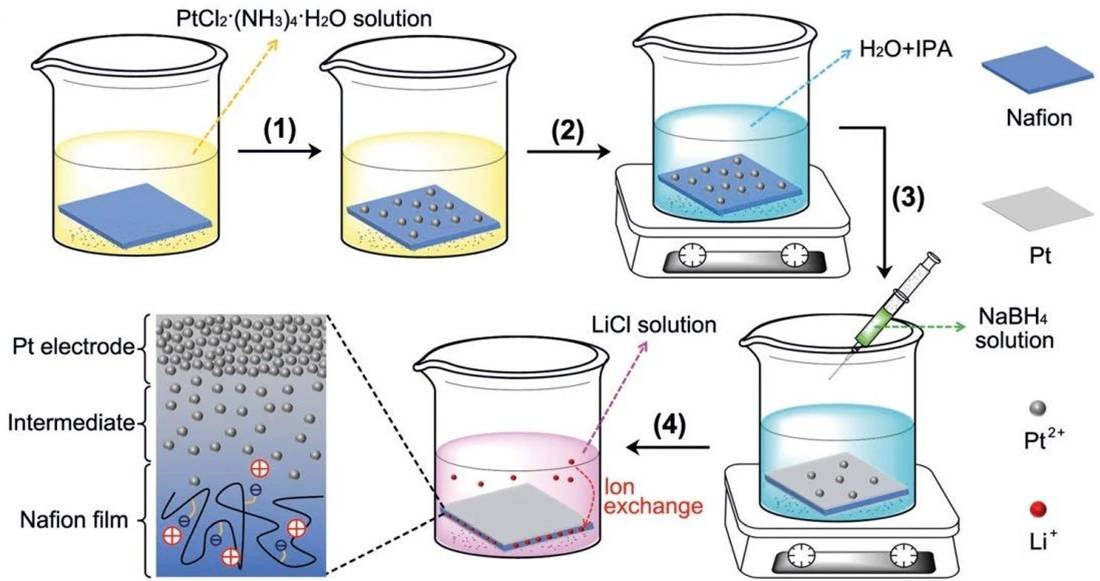
图1异丙醇辅助化学镀制备Nafion IPMC的路线图
除此之外,研究人员使用一维力传感器测量了NafionIPMC弯曲所产生的阻滞力,结果显示:IPMC尖端的阻滞力随施加电压的增大而增大,且阻滞力比传统的IPMC提高了约10倍。此外,研究人员将重物固定在NafionIPMC的一端,其最高可承受自重20倍的物体。而且Nafion IPMC臂所提升重物的高度,可以通过调节驱动电压的大小来精准控制,在未来有望应用于机械臂。
图2 Nafion IPMC承重性能测试
研究人员将兼具大变形和快响应的Nafion IPMC进一步应用于多种模式变形的新型仿生制动器,设计了图3所示的仿生花,以模仿连翘花的花瓣开合过程。在直流电压的作用下,仿生花可以实现可逆的花瓣开合行为。

图3 仿生花瓣
随后,研究人员制造了一个仿生藤蔓,以模仿黄瓜藤蔓的卷曲运动。如图4所示,仿生藤蔓最初是笔直的,当施加电压后,藤蔓可以无延时地进行快速卷曲,且此过程可逆。

图4 仿生藤蔓
除了模拟植物的运动外,研究人员还将Nafion IPMC用于模拟蜻蜓高频振翅的运动。如图5所示,Nafion IPMC所制备的蜻蜓翅膀可以在较高频率的电压驱动下实现快速振动,这表明Nafion IPMC在大变形和快响应方面具有出色的性能。

图5 模拟蜻蜓翅膀
本篇文章中,研究人员所制备的高性能Nafion IPMC在较低电压的驱动下,同时实现了大形变和快速响应,而且表现了出色的“四两拨千斤”的多模式驱动性能,能够模拟花瓣开合、藤蔓卷曲/解开以及高频蜻蜓翅膀振动等动植物行为。这项技术不仅为大位移和快速响应的轻型致动器的制造铺平了道路,而且为生物医学设备和仿生机器人等领域提供了新的技术支持!
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/adfm.201908508







Copyright © 2024 International Society of Bionic Engineering All Rights Reserved
吉ICP备11002416号-1