


Journal of Bionic Engineering (2024) 21:112–125https://doi.org/10.1007/s42235-023-00429-8
Simulating the GRF of Humanoid Robot Vertical Jumping Using a Simplifed Model with a Foot Structure for Foot Design
Chuanku Yi1 · Xuechao Chen1,2 · Yu Zhang1 · Zhangguo Yu1,2 · Haoxiang Qi1 · Yaliang Liu1 · Qiang Huang1,2
1. School of Mechatronical Engineering, Beijing Institute of Technology, Zizhuyaun, Haidian, Beijing 100081, China
2. Beijing Advanced Innovation Center for Intelligent Robots and Systems, Beijing Institute of Technology, Zizhuyuan, Haidian, Beijing 100081, China
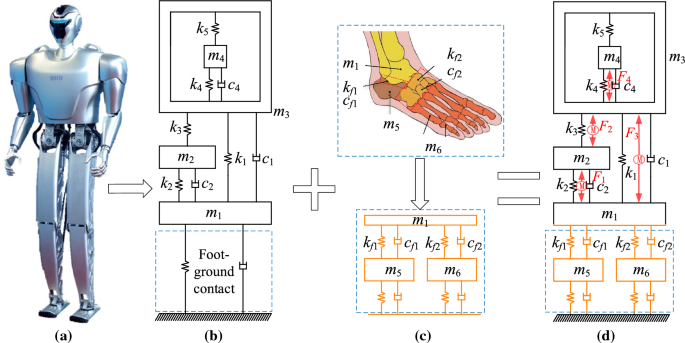
AbstractThere are many theories and tools for human or robot motion simulation, but most of them require complex calculations. The LNZN model (a simplifed model named by the proposers) simplifes the human model and facilitates simulation of the Ground Reaction Force (GRF) of body landing by spring damping model and ignoring joint rotation movements, which can reduce the amount of computation obviously. In this paper, the LNZN model of human running is selected as the basis and is modifed to obtain the LNZN model of a robot, which expands the application of the LNZN model. According to the structure of the human foot, a foot structure is then added to the simplifed model to reduce the GRF. We also applied driving forces to the new model to simulate the whole high jump motion of the robot to expand the functions of the LNZN model. The obtained GRF data were anastomotic to the actual experimental results. In addition, the efects of variables, such as the mass, hardness, and damping, of the foot on the GRF at the moment of landing were also explored. Finally, based on the guidelines obtained for the design of the robot’s foot structure, we fabricated new robot’s feet and installed them on the actual robot and achieved a better cushioning efect than the original foot in experiments.
Keywords LNZN model · GRF simulation · Humanoid foot structure · Foot parameters







Copyright © 2024 International Society of Bionic Engineering All Rights Reserved
吉ICP备11002416号-1