


Journal of Bionic Engineering (2024) 21:126–136https://doi.org/10.1007/s42235-023-00432-z
Efcient Dynamic Locomotion of Quadruped Robot via Adaptive Diagonal Gait
Jian Bi1 · Teng Chen1 · Xuewen Rong1 · Guoteng Zhang1 · Guanglin Lu1 · Jingxuan Cao1 · Han Jiang1 · Yibin Li1
AbstractQuadruped animals in the nature realize high energy efciency locomotion by automatically changing their gait at diferent
speeds. Inspired by this character, an efcient adaptive diagonal gait locomotion controller is designed for quadruped robot.
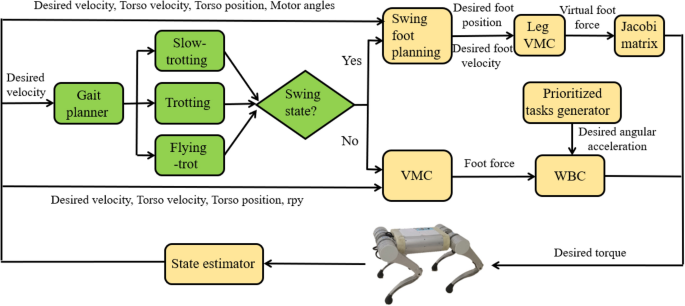
A unique gait planning method is proposed in this paper. As the speed of robot varies, the gait cycle time and the proportion
of stance and swing phase of each leg are adjusted to form a variety of gaits. The optimal joint torque is calculated by the
controller combined with Virtual Model Control (VMC) and Whole-Body Control (WBC) to realize the desired motion.
The gait and step frequency of the robot can automatically adapt to the change of speed. Several experiments are done with
a quadruped robot made by our laboratory to verify that the gait can change automatically from slow-trotting to fying-trot
during the period when speed is from 0 to 4 m/s. The ratio of swing phase is from less than 0.5 to more than 0.5 to realize the
running motion with four feet of the ground. Experiments have shown that the controller can indeed consume less energy
when robot runs at a wide range of speeds comparing to the basic controller.
Keywords Quadruped robot · Gait transition · Adaptive gait · Energy efciency







Copyright © 2024 International Society of Bionic Engineering All Rights Reserved
吉ICP备11002416号-1