


Journal of Bionic Engineering (2024) 21:137–148https://doi.org/10.1007/s42235-023-00423-0
Bio-inspired Attachment Mechanism of Dynastes Hercules: Vertical Climbing for On-Orbit Assembly Legged Robots
Yuetian Shi1 · Xuyan Hou1 · Zhonglai Na1 · Jie Zhou1 · Nan Yu1 · Song Liu1 · Linbo Xin1 · Guowei Gao1 · Yuhui Liu1
1. School of Mechatronics Engineering, Harbin Institute of Technology, Harbin 150001, China
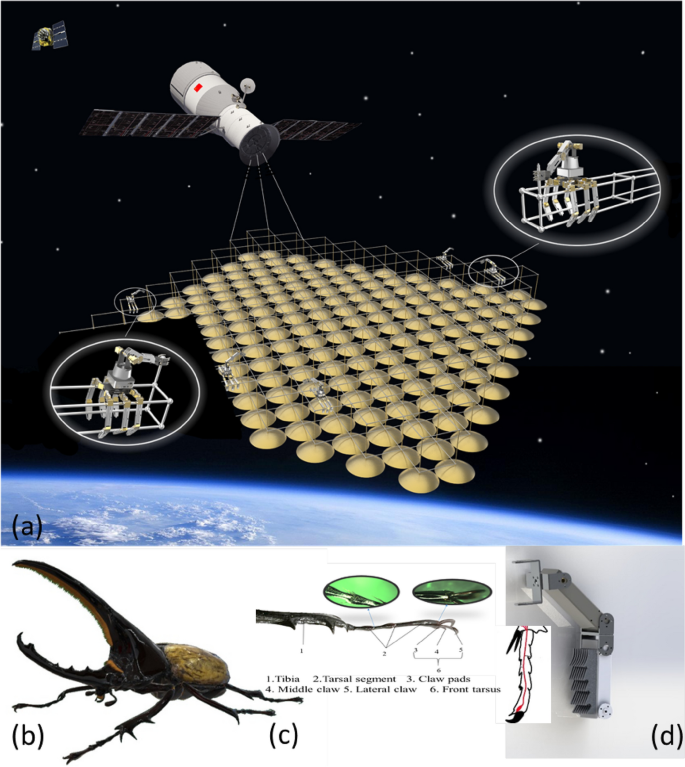
AbstractWith the increasing size of space facilities, on-orbit assembly requires robots to move on diferent heights of trusses. This paper proposes a bio-inspired attachment mechanism for robot feet to enable climbing on diferent heights of trusses. Inspired by the attachment and grasping abilities of Dynastes Hercules, we utilize its foot microstructures, such as microhooks and setae, to achieve efcient contact and frm grip with the surface. The morphology and arrangement of these structures can inspire the design of robot feet to improve their grasping and stability performance. We study the biological structure of Dynastes Hercules, design and optimize the bio-inspired structure, analyze the infuence of various factors from theoretical and experimental perspectives, and verify the feasibility of the scheme through simulation. We propose an ideal climbing strategy that provides useful reference for robot applications in practice. Moreover, the infuence laws of various factors in this paper can be applied to robot foot design to improve their operation ability and stability performance in the space environment. This bio-inspired mechanism can improve robot working range and efciency, which is critical for on-orbit assembly in space.
Keywords Space assembly robot · Truss climbing · Bionic structure · Dynastes Hercules tarsus







Copyright © 2024 International Society of Bionic Engineering All Rights Reserved
吉ICP备11002416号-1