


Journal of Bionic Engineering (2024) 21:166–176https://doi.org/10.1007/s42235-023-00428-9
A Miniaturized Crawler Design Based on an Origami-inspired and Geometrically Constrained Spherical Six-bar Linkage
Subin Chae1 · Gwang?Pil Jung1
1. Department of Mechanical and Automotive Engineering, Seoul National University of Science and Technology, Seoul 01811, South Korea
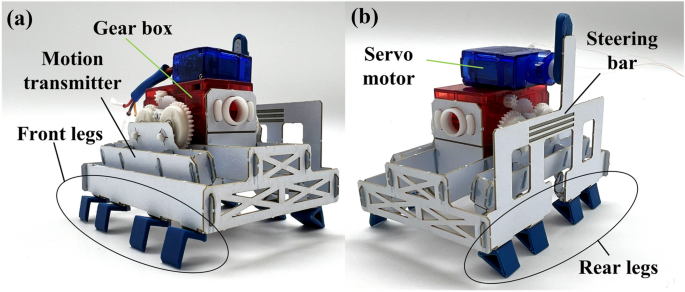
AbstractThis paper focuses on a newly developed transmission for a milli-scale eight-legged crawling robot called OriSCO. The transmission allows intuitive steering by directly changing the direction of the propulsion force. The transmission is based on the constrained spherical six-bar linkage. The constrained spherical six-bar linkage passes only reciprocating motion out of the motor’s rotating motion, allowing the crawling legs to kick the ground and obtain propulsion. Steering is achieved by adjusting the geometric constraints of the spherical six-bar using a servomotor, allowing the direction of propulsion to be changed. As a result, the OriSCO can move along the ground at a speed of 2.15 body lengths/s, and the robot is 60 mm long.
Keywords Bio-inspired robot · Crawler · Crawling robot · Direction change · Spherical six-bar linkage







Copyright © 2024 International Society of Bionic Engineering All Rights Reserved
吉ICP备11002416号-1