


Journal of Bionic Engineering (2024) 21:177–191https://doi.org/10.1007/s42235-023-00424-z
Bioinspired Closed-loop CPG-based Control of a Robotic Manta for Autonomous Swimming
Yiwei Hao1,2,3 · Yonghui Cao1,2,3 · Yingzhuo Cao1,2,3 · Xiong Mo2 · Qiaogao Huang1,2,3 · Lei Gong2 · Guang Pan1,2,3 · Yong Cao1,2,3
1. School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710072, China
2. Unmanned Vehicle Innovation Center, Ningbo Institute of NPU, Ningbo 315103, China
3. Key Laboratory of Unmanned Underwater Vehicle Technology of Ministry of Industry and Information Technology, Xi’an 710072, China
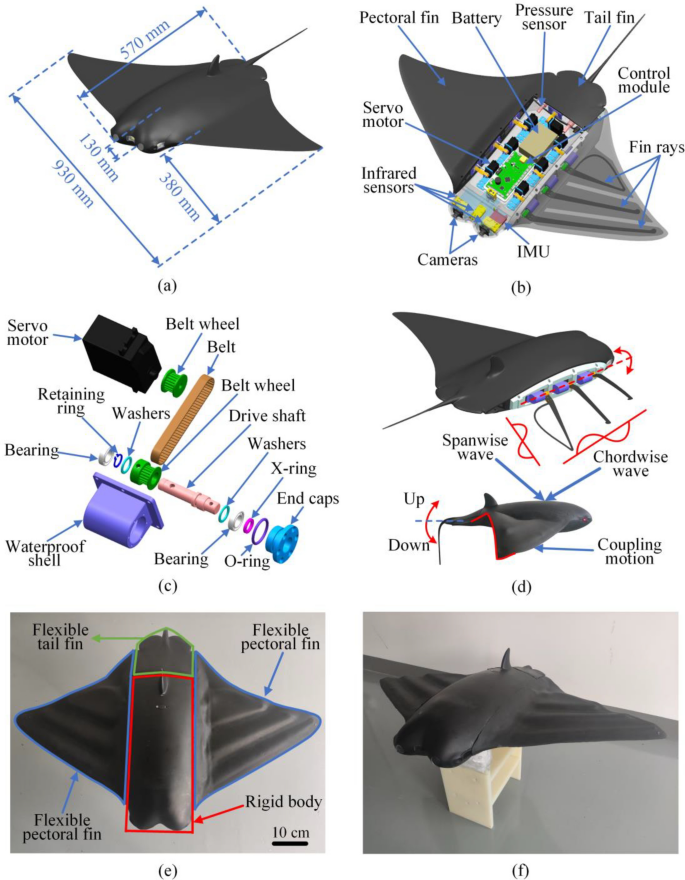
AbstractFish in nature exhibit a variety of swimming modes such as forward swimming, backward swimming, turning, pitching, etc., enabling them to swim in complex scenes such as coral reefs. It is still difcult for a robotic fsh to swim autonomously in a confned area as a real fsh. Here, we develop an untethered robotic manta as an experimental platform, which consists of two fexible pectoral fns and a tail fn, with three infrared sensors installed on the front, left, and right sides of the head to sense the surrounding obstacles. To generate multiple swimming modes of the robotic manta and online switching of different modes, we design a closed-loop Central Pattern Generator (CPG) controller based on distance information and use a combination of phase diference and amplitude of the CPG model to achieve stable and rapid adjustment of yaw angle. To verify the autonomous swimming ability of the robotic manta in complex scenes, we design an experimental scenario with a concave obstacle. The experimental results show that the robotic manta can achieve forward swimming, backward swimming, in situ turning within the concave obstacle, and fnally exit from the area safely while relying on the perception of external obstacles, which can provide insight into the autonomous exploration of complex scenes by the biomimetic robotic fsh. Finally, the swimming ability of the robotic manta is verifed by feld tests.
Keywords Biomimetic robotic manta · Central Pattern Generator · Closed-loop control · Backward swimming







Copyright © 2024 International Society of Bionic Engineering All Rights Reserved
吉ICP备11002416号-1